This website uses cookies that store information about your usage of the page. By continuing to use this page you confirm you are happy with that.
Review and change how cookies are used.
Our research in the areas of robotics and artificial intelligence with with emphasis on assistive, rehabilitation and social robotics has been conducted in various national and international research projects. Many of the projects have been supported by and realised in our long-term focus areas.
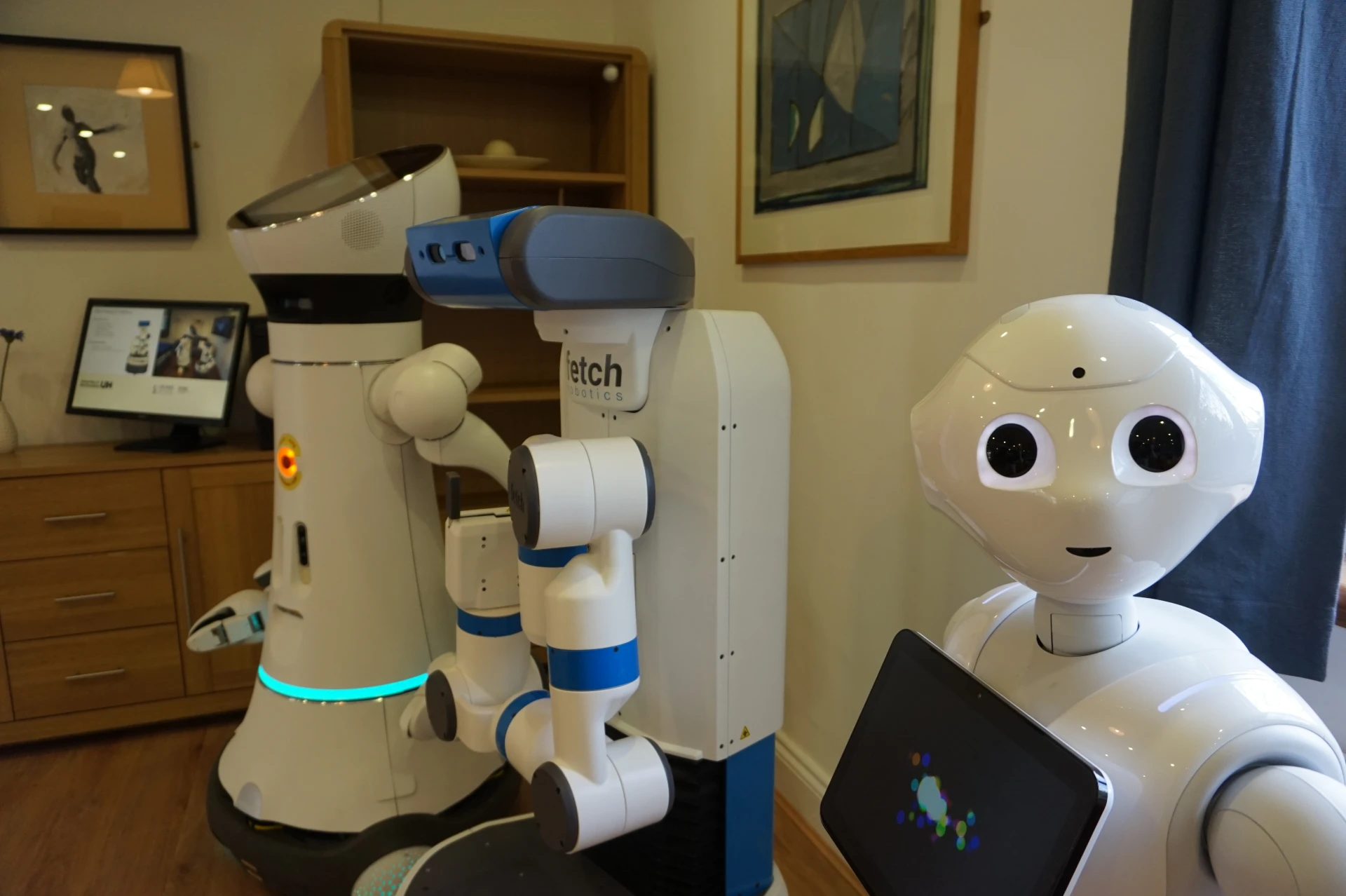
Robot House is a unique facility for researching human-robot interaction. It provides a realistic home environment where academic and industry researchers can test how robots can provide physical and cognitive support to humans and looks towards a future where robotic companions may play a greater role in caring for older people.

Kaspar is a child-sized humanoid robot designed as a social companion to improve the lives of children with autism and other communication difficulties.
By interacting and behaving in a child-like way, Kaspar helps teachers and parents support children with autism to overcome the challenges they face in socialising and communicating with others.

Website
07/2025 - 30/06/2026
Dr Patrick Holthaus (PI), Dr Gabriella Lakatos
Aberystwyth University (Patricia Shaw), Herriot-Watt University (Daniel Hernández García)
This topic group will function as a single point of contact to discuss, develop and disseminate best practices and requirements for conducting meaningful human-robot interaction (HRI) research. We aim at mapping HRI research within the UK and providing guidance for emerging researchers in the associated fields of HRI, as well as establishing a baseline methodology that ensures the involvement of relevant user groups and supports reproducibility in HRI.
07/2025 - 06/2027
Prof. Farshid Amirabdollahian (PI), Dr Patrick Holthaus, Dr Gabriella Lakatos, Angela Dickinson
Princess Alexandra Hospital
While there is a consensus that integration between healthcare and social care is the necessary step to a sustainable solution for healthy ageing, significant challenges remain that affect such integration. Issues such as chronic staff shortages as well as social inequalities impact on such integration. We hypothesise that a sustainable healthy ageing is possible via 'virtual ward at home' concept, where elements of staff shortages and healthcare inequalities are targeted using virtualisation of a standardised service.

Website
11/2023 - 10/2027
TWI Hellas
Prof. Farshid Amirabdollahian (PI), Dr Patrick Holthaus, Dr Gabriella Lakatos, diego, Dr Felipe Romero Moreno
Universität Heidelberg, Trafisense Monoprosopi Idiotiki Kefalaiouchiki Etaireia, Elliniko Mesogeiako Panepistimio, Scuola Superiore S'Anna, Fundacio Eurecat, Institut Jožef Stefan, Universiteit Twente, Iuvo, Roessingh, Brunel University London, Imperial College London
SWAG aims to explore a fundamentally new approach to engineering soft structures that omit fully rigid materials for inflatable ones made from high-strength fabrics and films when manufacturing human-assistive exoskeletal devices that target strain-prone segments of the human body (i.e. lower body and core). Such soft wearable adaptive garments with actuation capabilities offer higher variable stiffness and force-to-weight ratios compared to other existing methods, and simultaneously entirely conform to each joint's intricate kinematics. Because of this, new design approaches can be used as building blocks to realise complete assistance for multi-degree-of-freedom joints, such as the ankle or hip, by adapting flexible and conforming motions achieved by continuum robot designs.
Website
05/2023 - 04/2026
Swansea University (Julian Hough)
Dr Frank Förster (PI), Dr Patrick Holthaus (advisory)
The FLUIDITY project aims (1) to to develop a toolkit for building and testing interactive robot models in a simulated environment with human participants in a Virtual Reality (VR) HRI environment and (2) to increase the interaction fluidity between humans and robots when engaged in multimodal, physical interactions.

Website
09/2021 - 08/2024
University of Nottingham (Praminda Caleb-Solly)
Prof. Farshid Amirabdollahian (PI), Dr Patrick Holthaus, Dr Gabriella Lakatos
University of Sheffield (Mark Hawley), Sheffield Hallam Universtiy (Alessandro Di Nuovo), Heriot-Watt University (Mauro Dragone)
The EMERGENCE network aims to create a sustainable eco-system of researchers, businesses, end-users, health and social care commissioners and practitioners, policy makers and regulatory bodies in order to build knowledge and capability needed to enable healthcare robots to support people living with frailty in the community.
Website
06/2021 - 06/2023
Prof. Farshid Amirabdollahian, Yi Sun (supervisor)
Alok Sahu (associate)
In this project, UH will help Heales Enterprises Ltd (HEL) to set up an automatic question generation system using advanced Machine Learning methods. This system will be used in Occupational Health Assessment. With the introduction of medically supported Artificial Intelligence (AI), HEL will gain a competitive advantage in the Occupational Health market. The AI will also enable auto-completion of Management Advice reducing OHA and, in future, OHP time to compile reports.
Website
09/2019 - 08/2022
Gdańsk University of Technology
Dr Ben Robins (PI), Dr Luke Wood, Dr Gabriella Lakatos, Dr Patrick Holthaus
Istanbul Teknik Universitesi, Yeditepe University, Macedonian Association for Applied Psychology, Universität Augsburg
EMBOA project (Affective loop in Socially Assistive Robotics as an intervention tool for children with autism) aims at the development of guidelines and practical evaluation of applying emotion recognition technologies in robot-supported intervention in children with autism. Children with autism spectrum disorder (ASD) suffer from multiple deficits, and limited social and emotional skills are among those, that influence their ability to involve in interaction and communication.
Website
02/2022 - 07/2022
Prof. Farshid Amirabdollahian (PI), Dr Ben Robins, Dr Luke Wood, Dr Gabriella Lakatos, Sílvia Moros Español
Whilst a vast amount of research has investigated communication interventions and their impact on children with Speech Language and Communication Needs (SLCN), the possibility of using state of the art robotics technology, specifically focused on SLC therapies has had very little investigation. This research will be a pioneering study, using the humanoid robot Kaspar as a therapeutic tool for children with learning disabilities in need of SLC therapies to investigate how robotic technology could help these children.

Website
07/2021 - 06/2022
Prof. Farshid Amirabdollahian (PI), Dr Ben Robins, Dr Patrick Holthaus, Dr Gabriella Lakatos, Dr Luke Wood, Sílvia Moros Español
Dr Marina Sarda-Gou
Kings College London (Mohammad Mousavi, Hana Chockler), Garston Manor School, Compusult
The project focuses on identifying how causal explanation can influence trust in an educational robotic platform, the Kaspar robot. We hypothesise that a robot’s ability to explain its educational actions would make it a more trustworthy educational tool, for the pupils, their parents and their teachers. This may in turn make the robot-mediation more successful.
Website
03/2019 - 03/2022
Prof. Farshid Amirabdollahian, Dr Kheng Lee Koay (supervisor), Dr Catherine Menon (supervisor)
Dr Ataollah Ramezan Shirazi (associate)
This is a KTP application for joint-development of a cucumber harvest robot for harvesting cucucmber grown in a greenhouse.

Website
03/2017 - 03/2019
Prof. Kerstin Dautenhahn (PI), Prof. Farshid Amirabdollahian (PI), John Senior, Michael L Walters, Dr Kheng Lee Koay
The goal of this proposal was to seek funding to extend the functionalities of the robotics hardware in the University of Hertfordshire's (UH) Robot House (RH), creating the Robot House 2.0 - and, importantly, to make it accessible to other research groups. RH2.0 was to become an easily accessible hub for UK universities and industry conducting research into smart home and robotics technology.

Website
02/2019 - 06/2019
Dr Catherine Menon (PI), Dr Patrick Holthaus
The SocCred (Assuring safety and social credibility) project was a small feasibility project to identify and characterise the link between social credibility and safety, funded by the AAIP (Assuring Autonomy International Programme). An interactive experiment indicated that users are more likely to accept the safety assessment of a robot that they consider socially intelligent instead of one lacking social competency, which users considered necessary to cross-check these against their own experience.